Dai piccoli progetti nascono grandi innovazioni: il successo di Paquitop e le nuove iniziative.
Il progetto originale
Paquitop è un progetto del Politecnico di Torino sostenuto da Fondazione DOT con lo scopo di realizzare un robot che si muova su ruote e supporti il personale sanitario nella cura dei pazienti trapiantati, grazie anche ad un braccio robotico capace di manipolare oggetti.
Un problema che riguarda tutti i pazienti
Le tecnologie utili nei trapianti hanno ricadute in ambiti più ampi. Non sono solo gli operatori sanitari che trattano i degenti trapiantati ad essere affaticati dalla cronica mancanza di personale. Così come non sono solo i pazienti che hanno subito un trapianto ad aver bisogno di supporto nel periodo successivo all’intervento. Per questi motivi, dal progetto Paquitop sono nati dei progetti rivolti a tutti i pazienti di tutti i reparti.
Il nuovo prototipo

Il nuovo robot può svolgere molti compiti:
- identificare con sicurezza il paziente;
- trasportare piccoli oggetti, come una bottiglietta d’acqua;
- agevolare le comunicazioni in caso il paziente abbia difficoltà a verbalizzare;
- permettere videochiamate attraverso tablet tra il personale sanitario, o tra paziente e familiari in situazioni di isolamento;
- aumentare la frequenza del monitoraggio del paziente;
- misurare parametri vitali della persona, come il rilevamento della temperatura corporea;
- stimolare delle attività riabilitative, sia cognitive che neuromotorie, attraverso attività ludiche come i videogiochi;
- permettere al paziente di fare esercizi come afferrare oggetti diversi in un programma di allenamento;
- sanificazione di locali.


Le maggiori innovazioni di questo prototipo sono due:
- l’operatore sanitario può letteralmente prendere per mano il robot e accompagnarlo nel percorso che lo strumento apprenderà e poi farà in autonomia. Questo riduce la formazione necessaria per istruire il robot;
- il robot è in grado di avvicinarsi nel miglior modo possibile al paziente, qualsiasi la posizione in cui si trova: che egli sia seduto o sdraiato.
Un secondo prototipo: la sedia movi.WE.Q
Dallo studio delle necessità dei degenti, sono emerse anche le fatiche legate agli spostamenti in ambienti stretti con quelli delle aziende sanitarie.

Questo prototipo può muoversi anche lateralmente rispetto alle sedie a rotelle tradizionali, che richiedono ampie manovre. Questo agevola movimenti necessari, ma spesso complessi, come l’accesso ai servizi igienici.
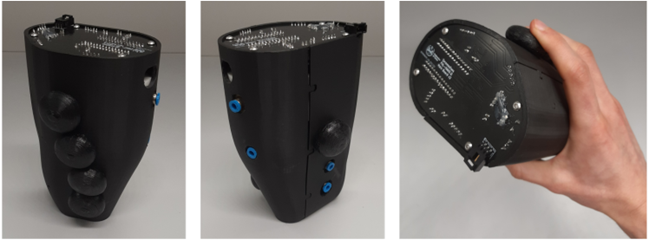
Movi.WE.Q può essere guidata sia da chi vi è seduto, sia da un operatore se il paziente è impossibilitato. Infatti, è dotato di una speciale maniglia che permette di gestirlo anche con l’uso di una sola mano: sono sufficienti pressioni lievi perché la macchina capisca dove l’operatore voglia andare, liberandolo da sforzi fisici.

Inoltre, la maniglia è dotata di impugnatore in grado di riconoscere se l’afferraggio dell’operatore è volontario o se si tratti solo di un contatto distratto.
Come contribuire alla ricerca
La ricerca non si ferma. Sostieni i progetti di applicazione della robotica all’interno degli ospedali.
DONA ORA con Paypal o fai un bonifico intestato a Fondazione D.O.T. Donazione Organi Trapianti Onlus
conto corrente bancario presso Intesa Sanpaolo Spa IBAN: IT78N0306909606100000153521
conto corrente bancario presso Unicredit Spa IBAN: IT31U0200801107000105582389


